탐사로봇은 주로 GPS 등이 접근되지 않는 곳에 활용되고, 전체 MAP을 알지 못함
근데 탐사를 한다고 하더라도 로봇이 현재 어디에 있는지 알아야 나중에 돌아올 수 있는지, 본인이 어디에 있는지 Localization을 해야 하고,
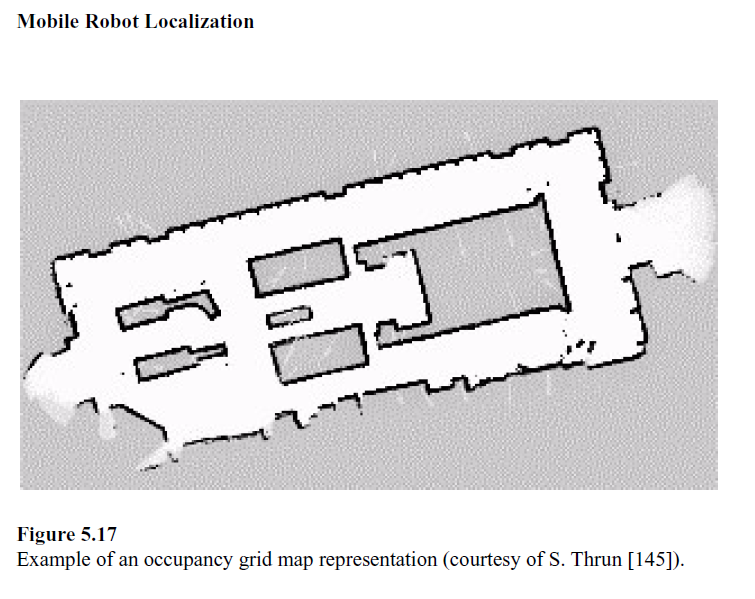
또한 다시 되돌아오거나 추가 탐사를 하기 위해서는 Mapping을 해야 함
그래서 SLAM(Simultaneous Localization and Mapping)과 같은 Localization & Mapping 기술이 필요함
보통은 바퀴가 몇바퀴 돌아가는지 Odometry 정보로 얼마나 이동했는지 파악하는데, 이는 오차가 있기 때문에 GPS나 IMU(각속도 등) 정보를 활용함

오도메트리는 왼쪽바뀌 오른쪽 바퀴 회전수와 휠베이스를 통해 조향각도도 구함
여기에 더해서 IMU에서 얻은 데이터와 함께 칼만필터로 센싱데이터 퓨전을 해서 활용함
'1. 인공지능 > (2) 기본이론 (자율주행, 제어)' 카테고리의 다른 글
| 최적 경로 탐색 : RRT (Rapidly Exploring Random Tree) + RRT* (0) | 2024.08.04 |
|---|---|
| PID vs MPC 제어 (0) | 2024.08.04 |
| 자율탐사기술 종류 (Frontier Based Exploration 등) (0) | 2024.08.04 |
| 최적경로 A* 알고리즘 (기본 개념 및 한계) (0) | 2024.08.03 |
| Kinematics (운동학) vs. Dynamics (동역학) - 자율주행 관점 (0) | 2024.08.02 |



