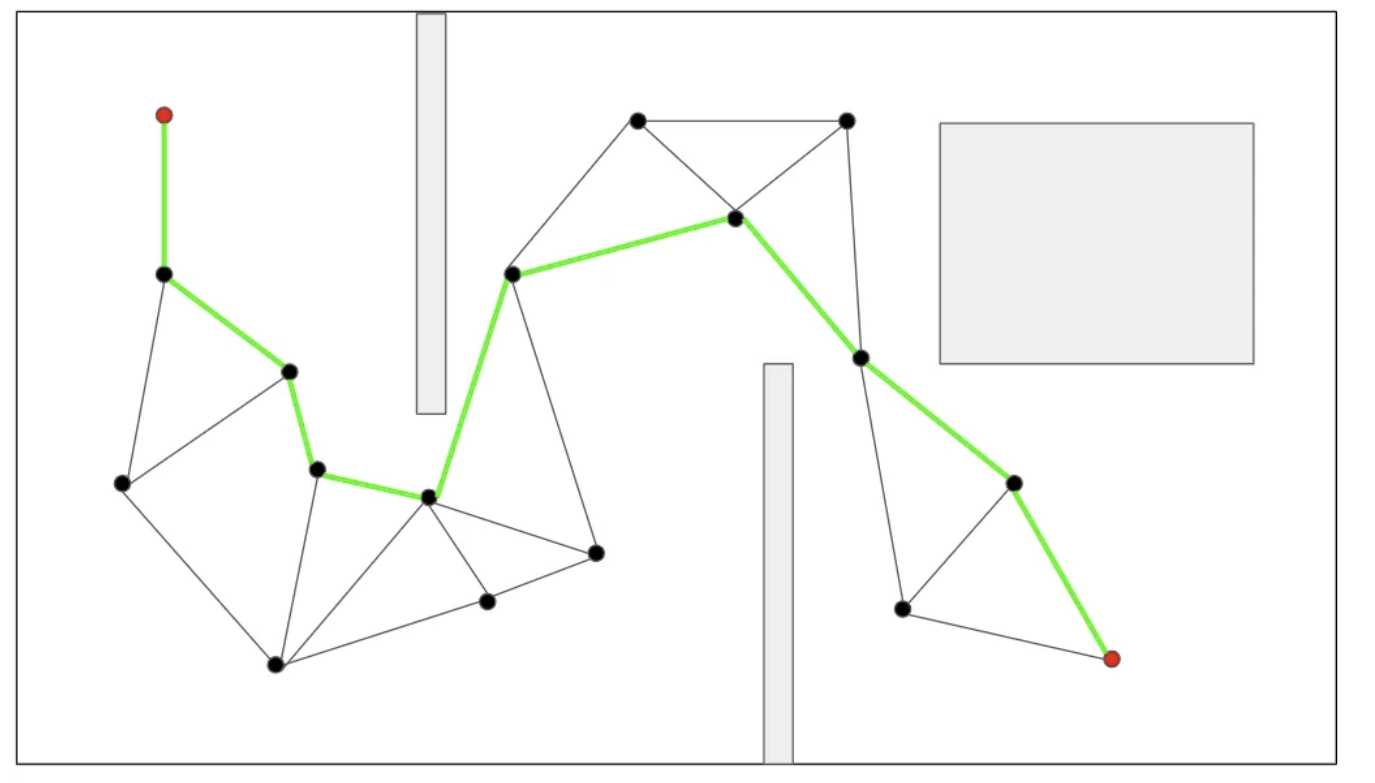
A* 알고리즘은 현재까지의 거리 g(n) + 제안된 이웃노드를 선택했을 때 이웃 노드에서 최종점 까지의 거리 h(n)를 합한 f(n)이 최소가 되는 이웃노드를 선택
하지만 이웃노드와 현재 노드 사이에 장애물이 있는지는 추가적으로 확인해야 함
제안된 점이 장애물 위에 있지는 않은지는 기본적으로 확인하지만, 라인-폴리곤 충돌 감지와 같은 알고리즘을 추가적으로 적용해야 함
A* 알고리즘이 간단하긴 한데, 당연히 휴리스틱한 방법이기 때문에 최적은 아닐 수 있음
'1. 인공지능 > (2) 기본이론 (자율주행, 제어)' 카테고리의 다른 글
| PID vs MPC 제어 (0) | 2024.08.04 |
|---|---|
| [개념] Mobile Robot Localization 필요성 (+Odometry) (0) | 2024.08.04 |
| 자율탐사기술 종류 (Frontier Based Exploration 등) (0) | 2024.08.04 |
| Kinematics (운동학) vs. Dynamics (동역학) - 자율주행 관점 (0) | 2024.08.02 |
| (2) ROS (Robot Operating System) (0) | 2024.07.31 |



