1. CAN 통신의 역사

CAN 통신은 과거 1983년에 보쉬가 개발하기 시작한 통신프로토콜으로써, 현재까지 수많은 자동차와 인공위성 시스템에 적용되고 있다.
인공위성 시스템의 경우 아직까지도 MIL-STD를 이용하는 경우가 많지만, 상용위성을 개발하는 업체들은 주로 CAN 통신을 이용하는 경우가 많다.
2. CAN 통신의 적용 예시
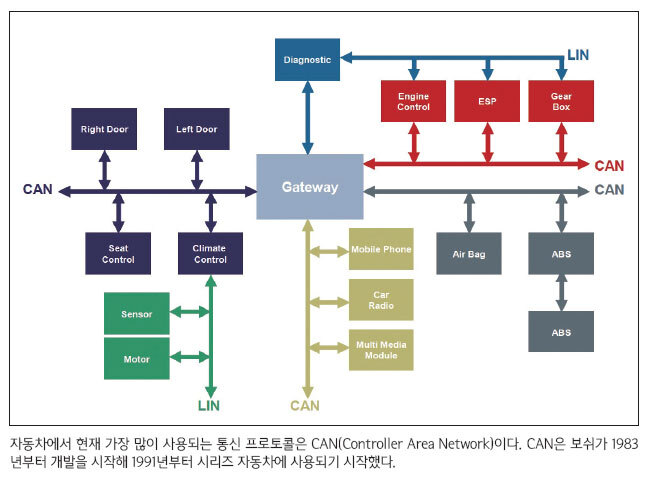
CAN 통신을 이용해 차량 내부를 연결한 예시를 보면 위와 같다.
기존에는 ECU들을 각각 연결했어야 했으나, CAN 통신을 이용하면 중앙 통제가 가능해지는 것이다.
이와 같은 장점 때문에 1990년대 이후로 수많은 차량에 CAN 통신이 적용되고 있다.
3. CAN 통신의 현황
그러나 CAN 통신이 개발된지 수십년이 경과되었기 때문에 속도에 대한 한계가 대두되었고, 2015년에는 CAN FD가 개발 및 발표되었다.
CAN FD의 경우 CAN(1 Mbit/s)과 FlexRay(10 Mbit/s) 사이의 성능을 가질 수 있게 되며, 이를 통해 더욱 빠른 데이터 처리가 가능해지고 있다.
이와 동시에 차량에 다른 통신 프로토콜을 적용하려는 움직임 또한 관찰되고 있다. BMW는 2014년경 CAN FD보다도 훨씬 빠르며 외부와의 통신이 가능해진 BMW X5를 출시하였는데, 이를 이용하여 AS 센터에 가지 않고서도 SW를 업데이트하는 시대가 도래하였다.

이더넷이 처음 차량에 도입된 이후 약 8~9년이 흐른 상황에서, 현대차 또한 이더넷을 도입하기로 발표한 상황이다.
이에 따라 인공위성 시스템에도 본격적으로 이더넷이 도입될 것이라 예상한다.